A Focus On LLMs Architecture
Large language models (LLMs) are all based on the transformer architecture invented in 2017 by
Vaswani et al. The transformer architecture achieves superior accuracy, few-shot learning, and
near-human abilities across diverse language tasks. However, these foundation models, often comprising
tens to hundreds of billions of parameters, are costly to train and resource-intensive during inference.
Inference costs escalate with long input contexts, which demand significant processing power due to
large input data. This makes efficient inference a critical challenge, particularly in managing memory
and compute resources.
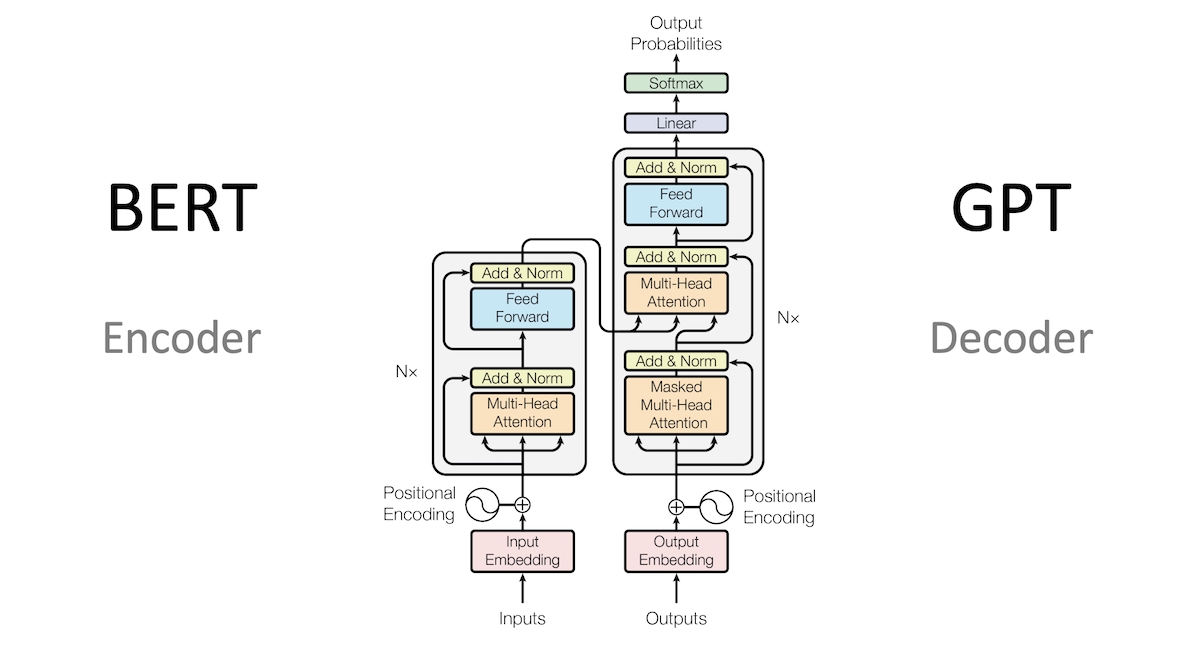 The Transformer Architecture
The Transformer ArchitectureMore specifically, most well-known LLMs, are decoder-only LLMs, like GPT-3, GPT-4, LLaMA, Mistral,
DeepSeek, etc. These models are pretrained on a causal modeling task, functioning as next-word
predictors. They process a sequence of tokens as input and produce following tokens autoregressively
until a stopping condition is reached.
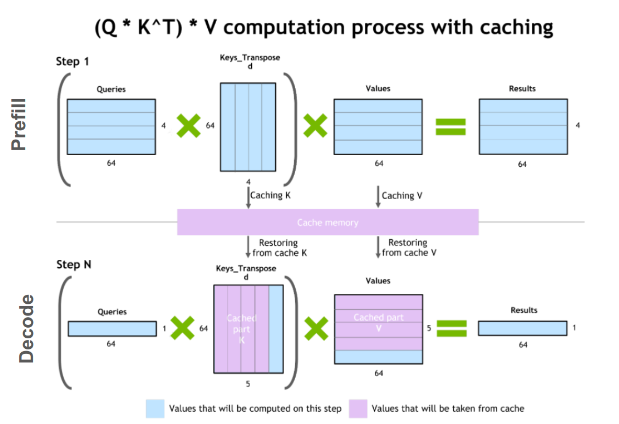
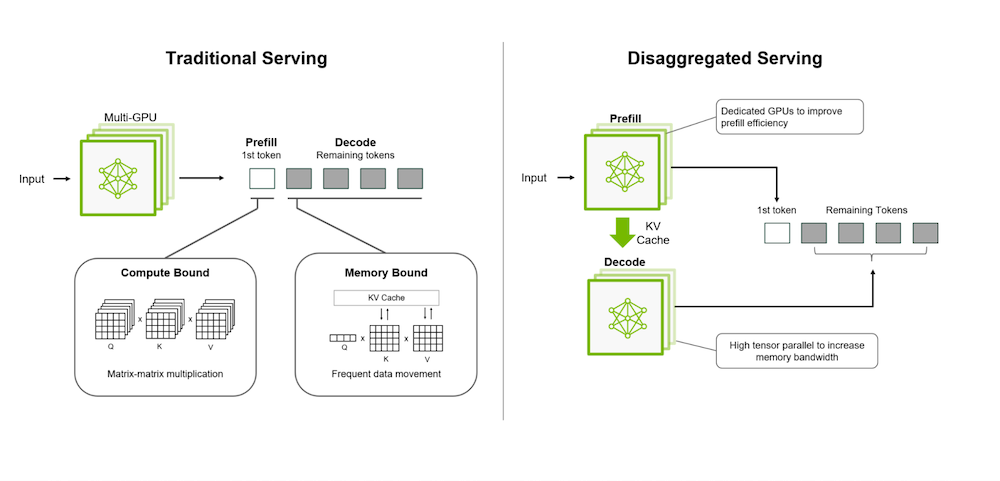
LLM inference in decoder-only models involves two key phases: the prefill phase and the decode
phase. In the prefill phase, the model processes input tokens to compute intermediate states (keys and
values) for generating the first new token. This phase, resembling a matrix-matrix operation, is
highly parallelized and efficiently utilizes GPU capabilities. Conversely, the decode phase generates
tokens, one at a time, relying on previous tokens’ states. This matrix-vector operation is memory-bound,
as data
transfer to the GPU, rather than computation speed, primarily dictates latency, leading to underutilized
GPU compute power.
Optimizing the decode phase is a focal point for addressing inference challenges. Solutions include
developing efficient attention mechanisms and better management of keys and values to reduce memory
bottlenecks. The post highlights practical approaches to enhance inference performance, assuming readers
have a basic understanding of the transformer architecture and attention mechanisms. These optimizations
are crucial for
improving throughput and reducing latency in real-world LLM deployments.
A further complication arises from the use of different tokenizers across LLMs, which affects token
comparability. Tokens, roughly equivalent to four English characters, vary in representation depending
on the tokenizer, making direct comparisons of inference throughput (e.g., tokens per second)
misleading. This variability underscores the need for standardized evaluation metrics to accurately
assess and compare LLM performance during inference.