Et fokus på LLMs arkitektur
Store språkmodeller (LLM-er) er alle basert på transformatorarkitekturen, som ble oppfunnet i 2017 av Vaswani et al. Transformatorarkitekturen oppnår overlegen nøyaktighet, læring med få innlæringsmomenter og nesten menneskelige evner på tvers av ulike språkoppgaver. Disse grunnmodellene, som ofte består av titalls til hundrevis av milliarder parametere, er imidlertid kostbare å trene opp og ressurskrevende under inferens. Inferansekostnadene eskalerer med lange inputkontekster, som krever betydelig prosessorkraft på grunn av store inputdata. Dette gjør effektiv inferens til en kritisk utfordring, særlig når det gjelder å håndtere minne- og databehandlingsressurser.
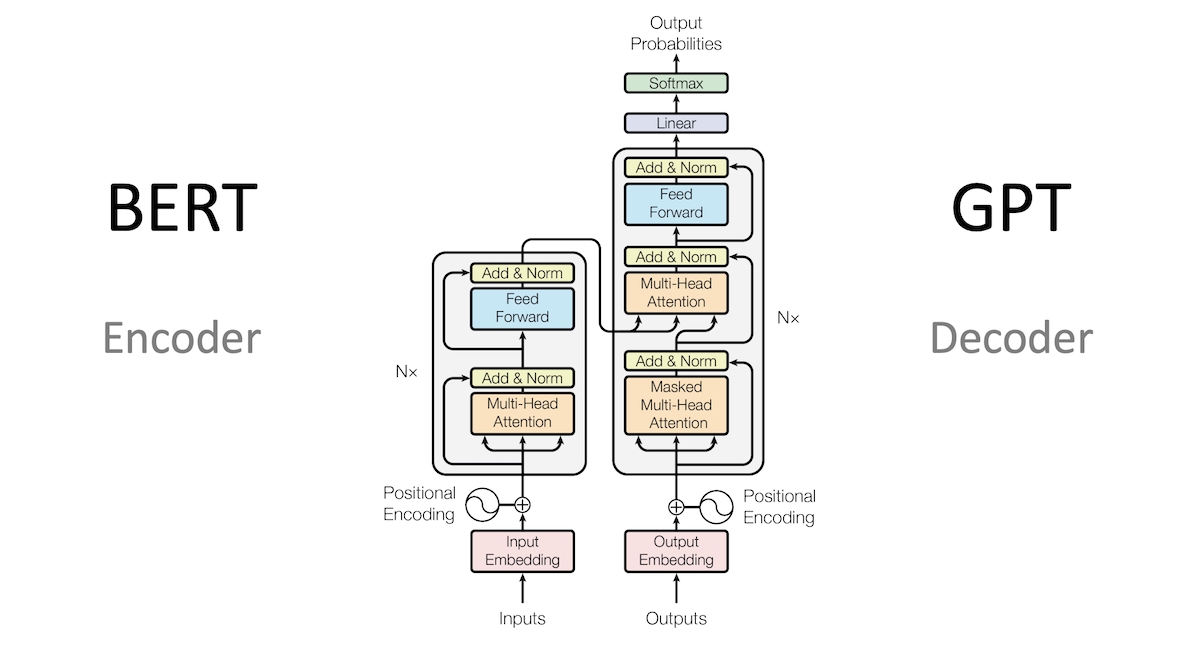 Transformatorarkitekturen
TransformatorarkitekturenMer spesifikt er de mest kjente LLM-ene rene dekoder-LLM-er, som GPT-3, GPT-4, LLaMA, Mistral, DeepSeek osv. Disse modellene er forhåndstrenet på en kausal modelleringsoppgave, og fungerer som prediktorer for neste ord. De behandler en sekvens av tokens som input og produserer følgende tokens autoregressivt til en stoppbetingelse er nådd.
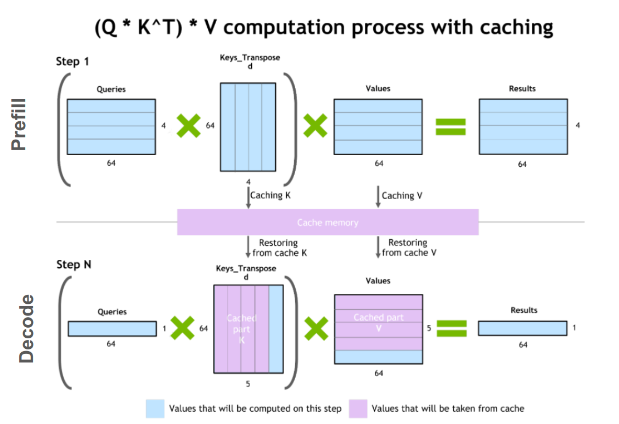
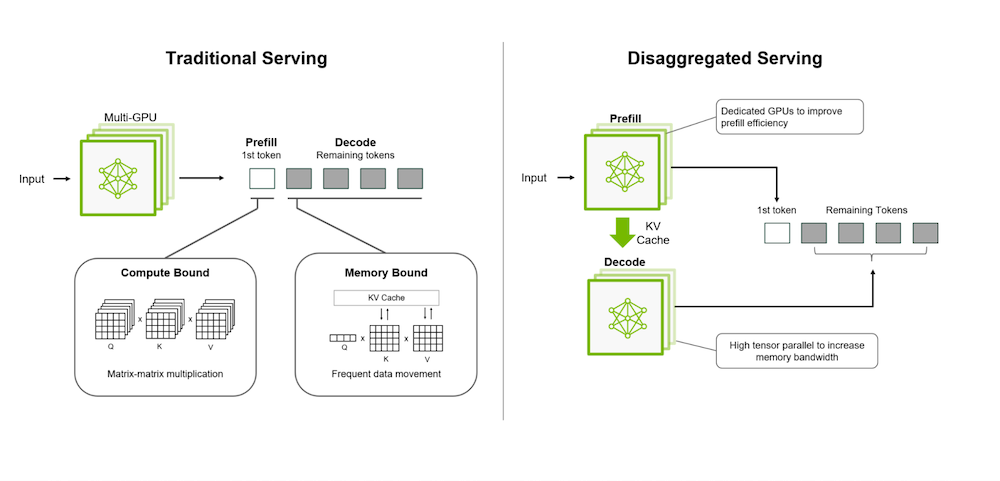
LLM-inferens i rene dekodermodeller involverer to hovedfaser: prefill-fasen og dekoderfasen. I prefill-fasen behandler modellen input-tokens for å beregne mellomliggende tilstander (nøkler og verdier) for å generere det første nye tokenet. Denne fasen, som ligner en matrise-matrise-operasjon, er svært parallellisert og utnytter GPU-kapasiteten på en effektiv måte. I avkodingsfasen genereres derimot tokens, én om gangen, basert på tidligere tokens' tilstander. Denne matrise-vektor-operasjonen er minnebundet, ettersom det først og fremst er dataoverføringen til GPU-en, og ikke beregningshastigheten, som bestemmer ventetiden, noe som fører til underutnyttelse av GPU-ens regnekraft.
Optimalisering av avkodingsfasen er et sentralt punkt når det gjelder å løse inferensutfordringer. Løsningene inkluderer utvikling av effektive oppmerksomhetsmekanismer og bedre håndtering av nøkler og verdier for å redusere flaskehalser i minnet. Innlegget tar for seg praktiske metoder for å forbedre inferensytelsen, forutsatt at leserne har en grunnleggende forståelse av transformatorarkitekturen og oppmerksomhetsmekanismene. Disse optimaliseringene er avgjørende for å forbedre gjennomstrømningen og redusere ventetiden i virkelige LLM-distribusjoner.
En annen komplikasjon er bruken av ulike tokenizer på tvers av LLM-er, noe som påvirker sammenlignbarheten av tokener. Tokens, som tilsvarer omtrent fire engelske tegn, varierer i representasjon avhengig av tokenizer, noe som gjør direkte sammenligninger av inferensgjennomstrømning (f.eks. tokens per sekund) misvisende. Denne variasjonen understreker behovet for standardiserte evalueringsmålinger for å kunne vurdere og sammenligne LLM-ytelsen under inferens på en nøyaktig måte.